Magnetodynamic WPT is based on a transmitter system generating a time-varying magnetic field and a receiver comprising a magnet physically moving within a receiver coil. The time-varying magnetic field from the transmitter creates a force or a torque on the magnet that moves or rotates, respectively. Its motion changes the magnetic flux in the receiver coil and generates power into a load by electromagnetic induction. The maximum frequency of operation is limited by how fast the magnet can physically move in the system, which is typically less than 1 kHz.
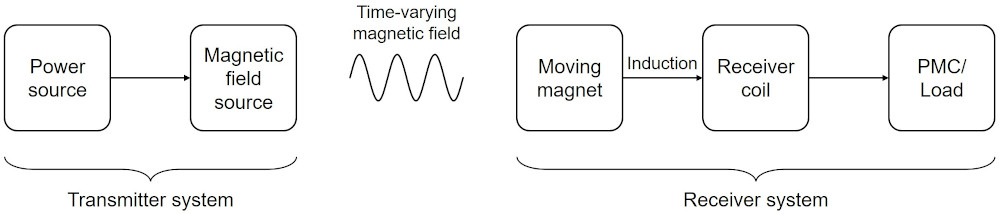
The transmitter is either a coil supplied by an ac current, or a rotating permanent magnet driven by a motor. In our approach, the receiver magnet is sensitive to magnetic torques and tends to rotate to align its magnetization with the time-varying magnetic field from the transmitter. The magnet can either rotates continuously around its axis, or, if coupled with a mechanical torsion spring for example (restoring torque), oscillates around an equilibrium position. The change of magnetic flux in the receiver coil induces an electromotive force at its terminals. The ac power can be then rectified and regulated to supply an electronic system or charge a battery.